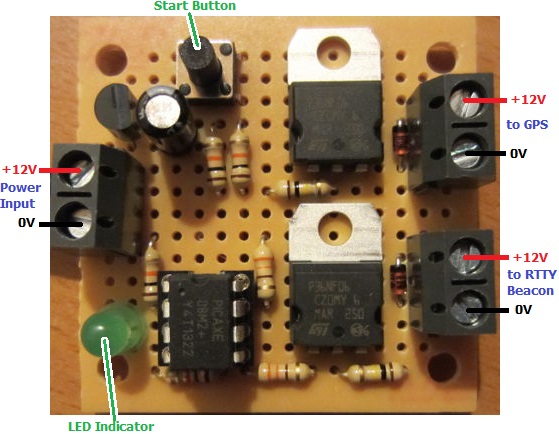
Pictured below is a timer we made recently to help conserve battery power for the telemetry for an attempted balloon crossing of the Atlantic.
 The payload of the balloon includes a GPS transmitter and an RTTY beacon so that the flight of the balloon can be tracked. Due to weight considerations, there is a limit to the size of the battery pack which can power these, and therefore there is a risk that the battery will run flat before the balloon (hopefully) lands in Europe after crossing the Atlantic from New York state.
The payload of the balloon includes a GPS transmitter and an RTTY beacon so that the flight of the balloon can be tracked. Due to weight considerations, there is a limit to the size of the battery pack which can power these, and therefore there is a risk that the battery will run flat before the balloon (hopefully) lands in Europe after crossing the Atlantic from New York state.
Therefore, we were commissioned to make a secondary timer which would supply power to the RTTY beacon only for 15 minutes in every hour, and also to supply power to he GPS transmitter only when it is likely to be over land – for the first 7 hours and then again after a couple of days have passed. For this we used a PICAXE microcontroller because of its lower power consumption.
![]() The GPS and RTTY modules to be powered are pictured above connected to the Arduino Nano and Arduino Uno which control them – both relatively high power consumption devices themselves. Future flights will reduce weight and power consumption by connecting the GPS, and RTTY to a single Arduino which will also put itself into sleep mode to conserve power.
The GPS and RTTY modules to be powered are pictured above connected to the Arduino Nano and Arduino Uno which control them – both relatively high power consumption devices themselves. Future flights will reduce weight and power consumption by connecting the GPS, and RTTY to a single Arduino which will also put itself into sleep mode to conserve power.
 We were previously involved in an amateur balloon flight to the lower stratosphere reaching an altitude of 120,000 feet during which the picture above was taken which clearly shows the curvature of the Earth and the edge of the atmosphere. We made the timer which automatically severed the connection between the balloon and the payload after a fixed time to comply with FAA requirements.
We were previously involved in an amateur balloon flight to the lower stratosphere reaching an altitude of 120,000 feet during which the picture above was taken which clearly shows the curvature of the Earth and the edge of the atmosphere. We made the timer which automatically severed the connection between the balloon and the payload after a fixed time to comply with FAA requirements.